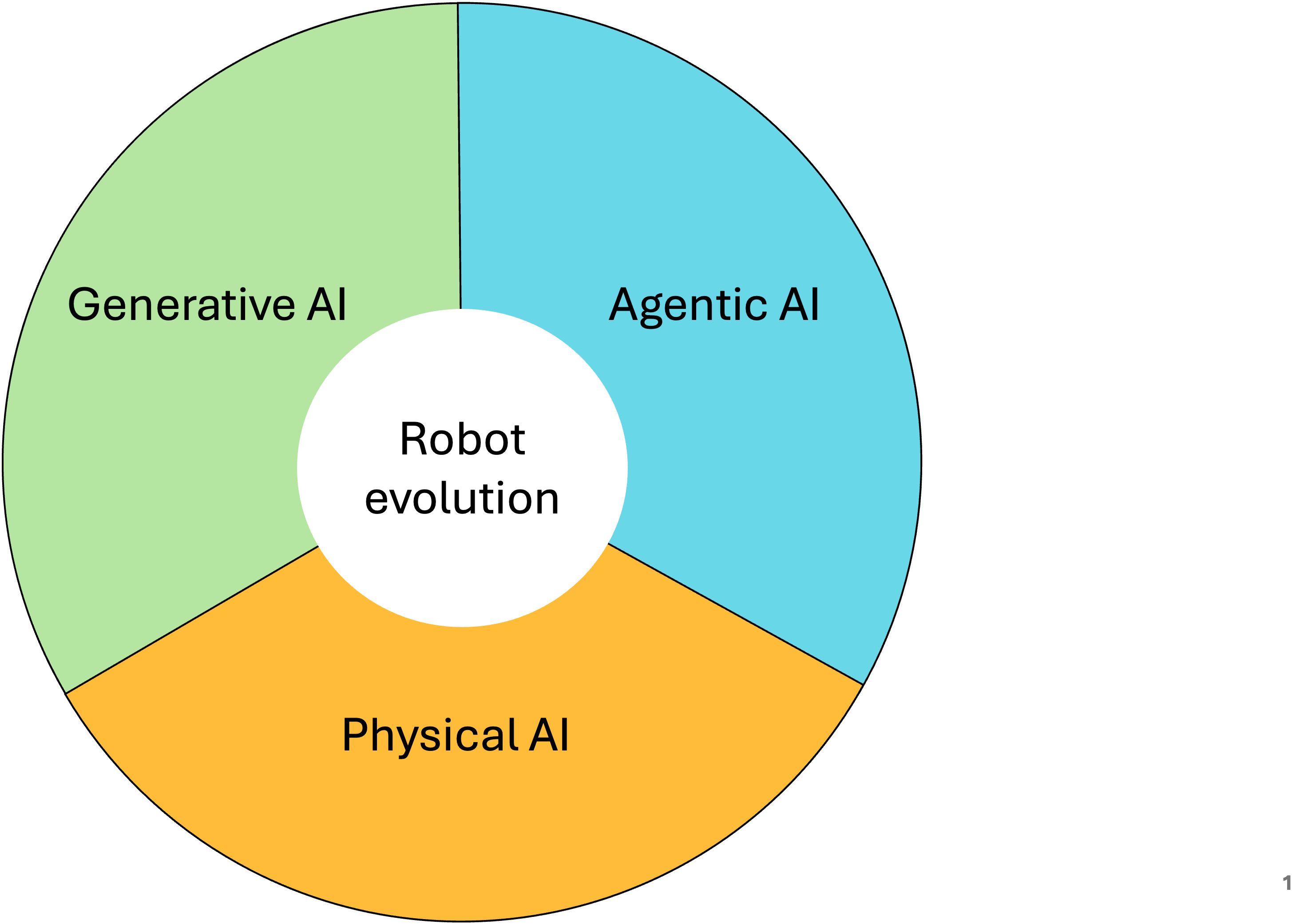
Three waves are reshaping AI: generative, agentic, and physical. Robot evolution draws on
all of them at once; it generates morphologies and controllers, gives robots agency over their own behaviour,
and is ultimately grounded in the physics of the real world.
2022 →
Generative AI
Cognitive and creative capabilities now widely taken for granted. In robot evolution: the engine that proposes new morphologies and controllers.
2026 →
Agentic AI
Autonomous, goal-directed action by digital agents. In robot evolution: the robots have agency and autonomy, their behaviour determines their fitness.
soon
Physical AI
Intelligence in physically embodied systems that interact with their surroundings. In robot evolution: robots 'live' in an environment where the laws of physics determine the results of the robots' actions. This holds even if the environment is only simulated.